준비물:우노+케이블, 점퍼선, 서보모터

서보모터는 PWM신호를 이용하여 회전을 제어할 수 있는 모터다.
보통 서보모터는 180~0도의 회전각을 가진다.
동작범위가 제한적이지만 힘이 강하고 정확한 위치 제어가 가능하다.
회로도
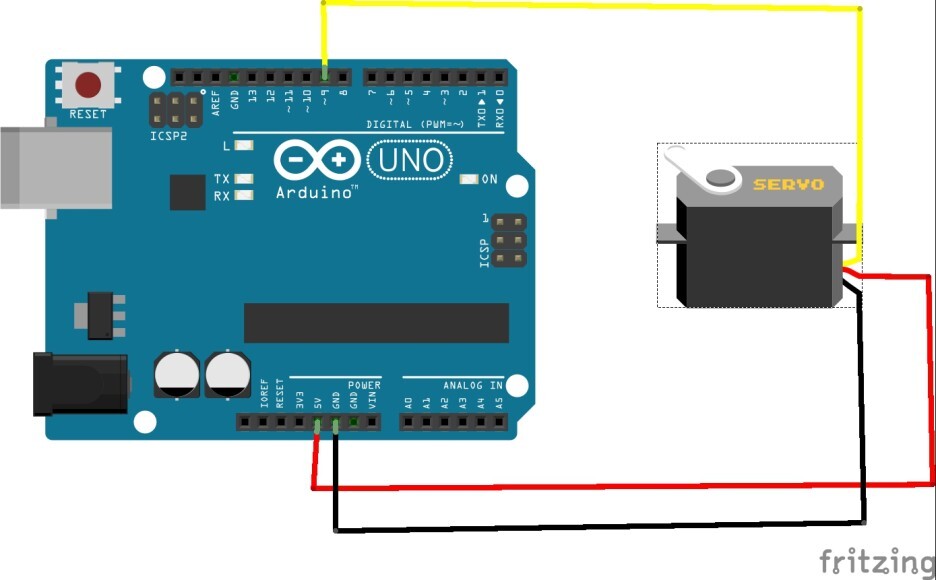
사진 설명을 입력하세요.
소스코드
#include<Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(9);
}
void loop() {
for (pos = 0; pos<= 180; pos += 1){
myservo.write(pos);
delay(20);
}
for (pos = 180; pos<= 0; pos -= 1){
myservo.write(pos);
delay(20);
}
}
*Servo x : x라는 서보를 선언합니다.
*myservo.attach(핀번호) : myservo의 신호선을 연결할 핀을 설정하기 위한 함수
*myservo.write(값) : myservo의 회전 위치를 설정하기 위한 함수
*myservo.detaxh() : myservo의 작동을 중지한다.
'아두이노' 카테고리의 다른 글
| 인텔리제이 자바 아두이노 시리얼통신 오류 Error 0x5 at ..\rxtx\src\termios.c(892): (0) | 2023.04.13 |
|---|---|
| 인텔리제이 자바 아두이노 rxtx 오류 / 자바 버전 오류 (0) | 2023.04.13 |
| 인텔리제이 자바 아두이노 rxtx 오류 Execution failed for task ':Main.main()'.> Process 'command 'C:/Program Files/Java/jdk-11/bin/java.exe'' finished with non-zero exit value 1 (0) | 2023.04.13 |
| 아두이노로 사운드 센서 제어하기 (0) | 2023.03.30 |
| 아두이노로 스텝모터 사용하기 (0) | 2023.03.30 |



댓글